
1.Motori
DC
Perchè cominciare
il tutorial con i motori DC? Perchè i motori DC , collegati ad un'opportuna
scheda di controllo, possono essere controllati con un segnale PWM (oggetto
del nostro tutorial), inoltre i motori DC di piccola potenza sono economici,
facili da reperire e spesso sono corredati di riduttore (gearbox) come nel caso
di quelli prodotti dalla Tamiya (ad esempio il twin motor gearbox è costituito
da due motorini con riduttori e assi di uscita indipendenti ma coassiali), dei
servi RC modificati per la rotazione continua e privati dell'elettronica interna
o dei motori di molti dei robot “panettoni” che ultimamente affollanno
le edicole (ad esempio, acquistando le prime due uscite del Cybot si ottiene
una base completa di motori e motoriduttori a soli 6 euro).
Per una spiegazione dettagliata e adatta ai principianti sui motori DC è
consigliabile leggersi il tutorial “Motori DC di piccola potenza”
scritto da Vincenzo Villa (disponibile presso il sito www.vincenzov.net , ricco
di guide e progetti molto utili), a noi basterà sapere che un motore
DC è dotato di due morsetti e che la velocità e il verso di rotazione
dell'albero motore dipendono dalla corrente che facciamo scorrere tra loro (cambiando
il verso della corrente si cambia il verso di rotazione dell'albero, aumentando
o diminuendo il modulo della corrente possiamo variare la coppia fornita dal
motore).
1.1
Controllo ON-OFF di motori DC
I motori DC possono essere controllati in vari modi: il pilotaggio più
semplice è quello ON-OFF che permette di comandare il motore solo alla
massima velocità di rotazione in un verso (interruttore ON) oppure fermarlo
(interruttore OFF): questo controllo può essere implementato con un interruttore
(es. un mos o un transistor) e con un diodo di ricircolo necessario per evitare
danni al resto del circuito (il motore è un carico con una componente
induttiva). Lo schema è quello di figura 1.
figura1:
pilotaggio ON-OFF: quando l'interruttore è aperto il motore è
fermo, quando è chiuso gira alla massima velocità. A destra un
esempio di implementazione
1.2 Il ponte ad H
Il tipo di controllo appena presentato non permette né la regolazione
della velocità del motore né la possibilità di far girare
il motore in entrambi i versi di rotazione.
Per far girare il motore nel verso opposto è necessario infatti invertire
il segno della corrente che passa all'interno del motore stesso, per far ciò
si usa un circuito chiamato ponte H costituito da 4 interruttori comandati e
da 4 diodi di ricircolo,il cui schema è rappresentato in figura 2.
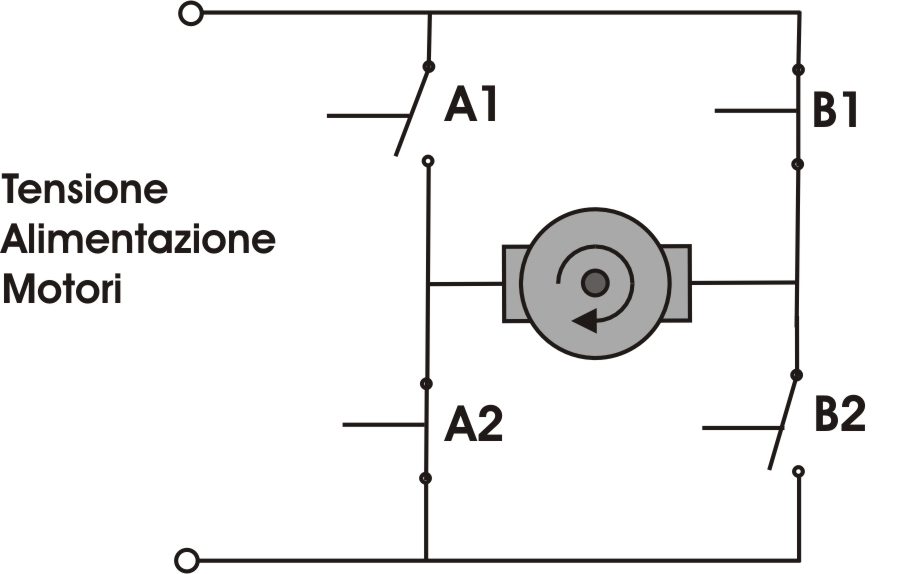
Figura 2: schema semplificato di un ponte H
Attivando i transistor A1 e B2 la corrente scorre nel motore in un verso mentre
attivando i transistor B1 e A2 la corrente scorre nel verso opposto. E' da evitare
la configurazione in cui sono accesi entrambi i transistor A o entrambi i transistor
B infatti la corrente di corto circuito su un lato del ponte potrebbe creare
seri danni al ponte stesso o al circuito di alimentazione: questa eventualità
non si presenterà con l'utilizzo della scheda di controllo proposta in
seguito.
1.3
Ponti H discreti e Ponti H integrati
Esistono due tipi di ponti H: i ponti H discreti, costituiti da componenti sparsi
come transistor e diodi e i ponti H integrati, in questo caso tutto il circuito
è racchiuso in un package plastico di tipo DIP (dual in-line package)
o simile. I ponti H integrati sono molto versatili e, oltre a garantire una
bassa occupazione di area nel circuito (in alcuni casi, come il SN754410 e l'
L293D, contengono anche i diodi di ricircolo), hanno buone prestazioni (l' L298
può fornire fino a 2A per ponte), possono essere essere montati in parallelo
per ottenere alte correnti e riescono a lavorare in un intervallo di tensioni
di alimentazione molto ampio (da 6V a 48V circa a seconda del modello).

Figura 3: Nell'ordine(da sx a dx): un doppio ponte H discreto(scheda controllo motori Cybot), un SN754410, un L293NE, un L298
La figura 4 rappresenta lo schema di funzionamento di un ponte integrato:
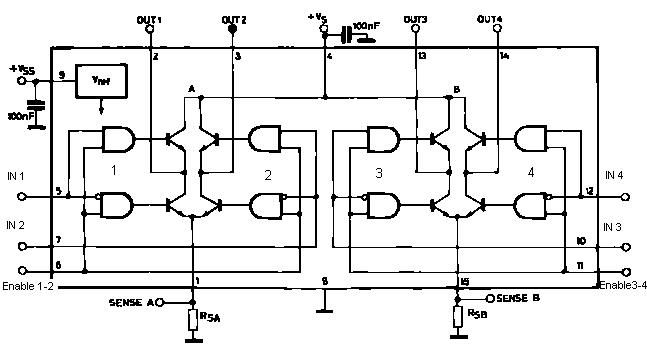
figura
4:Schema
di funzionamento interno di un ponte H integrato
Tale integrato è costituito da quattro mezzi ponti H (numerati in figura
come 1-2-3-4) ognuno dei quali è costituito da due transistor e da una
logica che li comanda in modo da accenderne solo uno alla volta: quando il transistor
superiore di un mezzo ponte è in conduzione quello inferiore sarà
necessariamente spento e viceversa. E' inoltre presente un comando di ENABLE
che permette di inibire il funzionamento di una coppia di mezzi ponti.
Si può inoltre notare la presenza di due pin dedicati alla connessione
di una resistenza di Sense per monitorare la corrente che scorre nel motore
(utile per un controllare l'assorbimento di corrente ed evitare rischiosi stalli
del motore) ma tale caratteristica non è presente in tutti i ponti H
integrati tra cui il SN754410 che verrà utilizzato nella scheda controllo
motori presentata in seguito.
Ricapitolando, per ognuno dei due ponti presenti nell'integrato abbiamo a disposizione
due ingressi di controllo per permettere il passaggio di corrente in un verso
e un ingresso di ENABLE per accendere e spegnere il ponte: come vedremo a breve
ci sono più modi di pilotare il ponte H e per comprenderli è necessario
aver capito bene a cosa servono questi tre ingressi.
Con l'introduzione del Ponte H abbiamo risolto il problema della rotazione del
motore in entrambi i versi, ora è necessario risolvere l'altro problema,
quello di poter regolare la velocità di rotazione, per far ciò
è necessario introdurre il concetto di PWM.