
3.Scheda
di controllo motori DC
E' giunto il momento di passare alla pratica, armatevi di fogli lucidi o pnp
blue, spolverate il vostro bromografo o il ferro da stiro e preparatevi all'incisione
di questo circuito stampato (ricordatevi le necessarie precauzioni quando maneggiate
soda caustica, percloruro ferrico e acqua ossigenata! ). Quella che segue è
una semplice scheda di controllo motori DC in PWM che può essere usata
sia in modalità LAP-PWM che in modalità SM-PWM (la descrizione
che segue tiene conto del LAP, per SM basta applicare quanto detto prima) basata
sull'integrato SN754410 visto in precedenza e su un sestuplo inverter 74HC14(vedi
schema in figura 8).
figura 8:schema della scheda controllo motori DC
L'interfaccia della scheda comprende quattro connettori e due jumper: dei quattro
connettori due (MOT1_CON e MOT2_CON) servono per la connessione dei motori,
uno (ALIM_CON) per l'alimentazione della logica e dei motori (il connettore
è a 4 pin, il primo per l'alimentazione della logica, il secondo e il
terzo per la massa e il quarto per l'alimentazione dei motori) e uno (CTR_CON)
per il controllo vero e proprio. I cinque pin del connettore di controllo sono
così usati: il primo e il secondo servono rispettivamente per l'ENABLE
e per il controllo PWM del primo motore, il terzo per la massa, il quarto e
il quinto rispettivamente per il controllo e l'ENABLE del secondo motore. Nel
caso in cui non sia necessario gestire l'ENABLE di un motore o di entrambi (ovviamente
ciò vale solo per il controllo LAP) tramite il uC basterà cambiare
la posizione del jumper relativo al motore, così facendo l'ENABLE sarà
tenuto alto da uno degli inverter del 74HC14 e potremo controllare i nostri
motori con soli due fili limitando al minimo l'impiego di porte del microcontrollore.
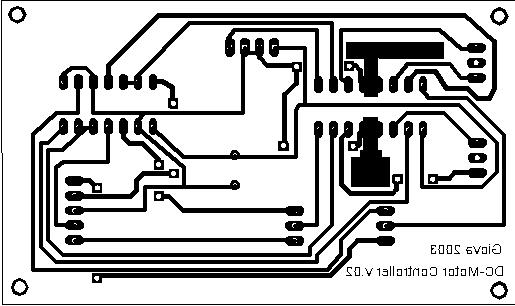
Figura 9: Scheda Lato Rame

figura 10: Lato componenti della scheda
Le due zone blu sotto l' SN754410 sono previste dal datasheet e servono per creare un'area di rame sulla pcb adibita a dissipare il calore prodotto dall'integrato. In rosso sono riportati i ponticelli.